
ハジメ(@hajime_rcj)です。
今更ですが 笑
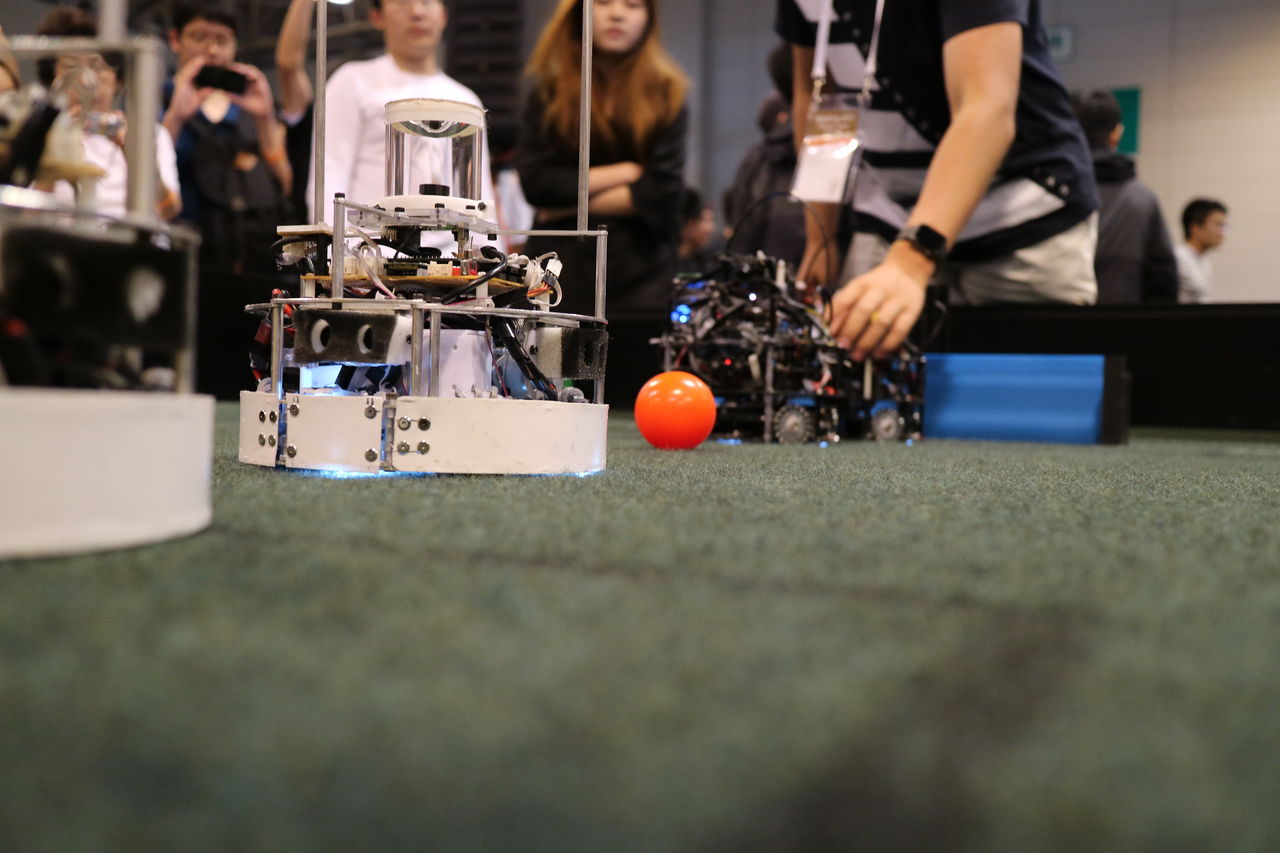
RoboCupJunior2017 Nagoya(世界大会), RoboCupAsia-Pacific2017のときのロボットについてです。
質問等あったらコメント,リプライなど気軽にお願いします!
足回り
MAXON DCX16 x 4
自作モータードライバ
自作オムニホイール x 4
センサー
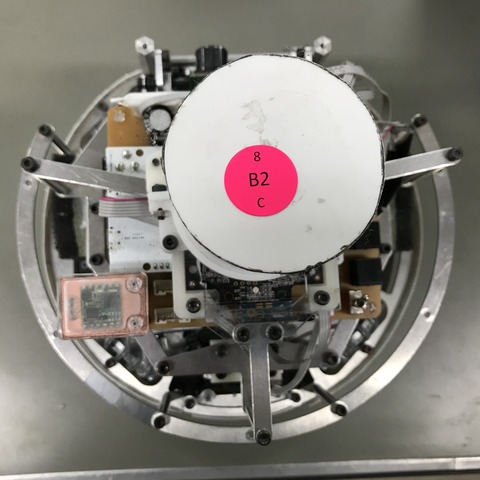
自作ラインセンサ(NJL7302L) x 4
JY901 x1
HC-SR04 x 4
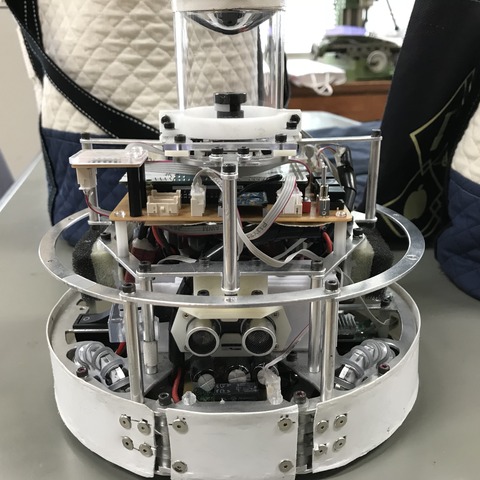
CUMcam5(Pixy) x1
バッテリー
HYPERION 2200[mAh] 3cells x 1
マイコン
Arduino DUE x 1
STM32 x 4
キッカー
ソレノイド CA1029 x1
XL6009 + G6A-274P x1
その他
ブラシレスモーター(ドリブラー) : HK-2206-5300kv x1
ダクテッドファン x1
ブラシレスESC : Mamba Max Pro x1
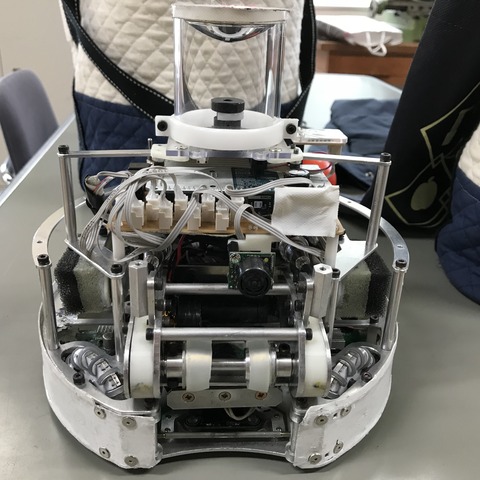
RoboCupJunior2017 Nagoyaのときは棒状,RoboCupAsia-Pacific2017はホイール型のドリブラーを使用していました。



追記(2018/03/03)
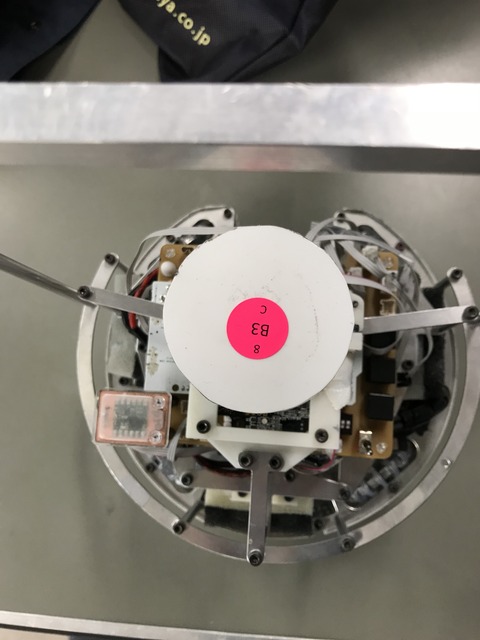
ラインセンサは十字に配置しています。ラインセンサ素子の感覚は20[mm]以内となっていて、機体がライン上にいると必ずどこかのラインセンサが反応するようになっています。

今更ですが 笑
RoboCupJunior2017 Nagoya(世界大会), RoboCupAsia-Pacific2017のときのロボットについてです。
質問等あったらコメント,リプライなど気軽にお願いします!
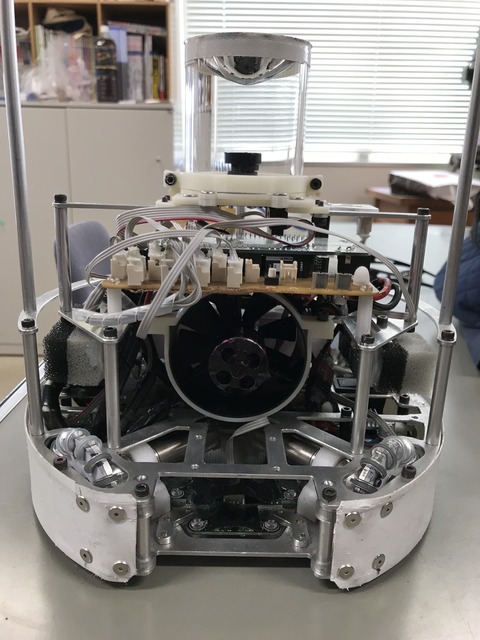
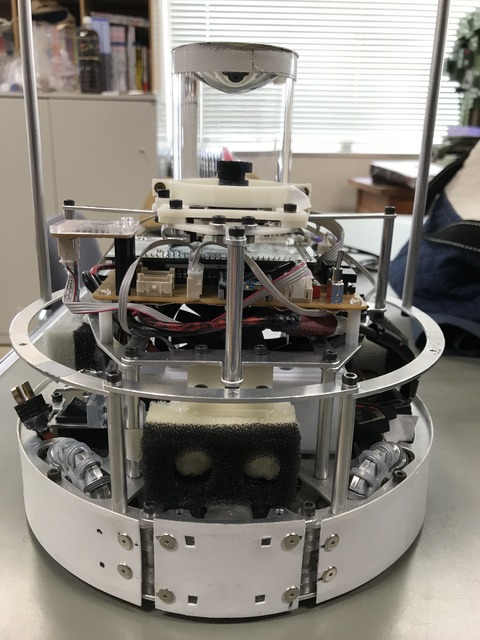
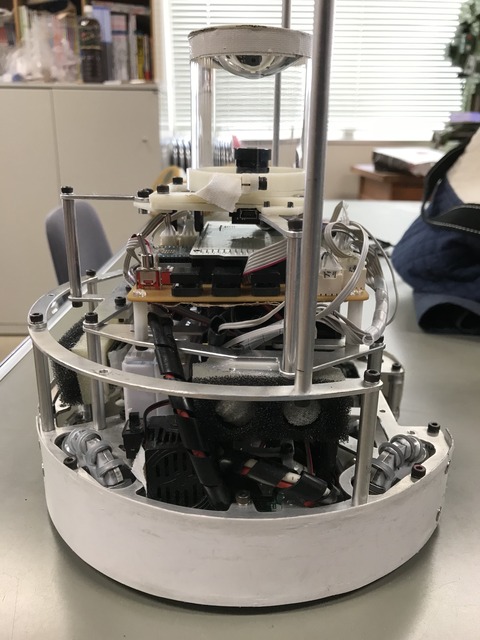
RobocupJunior2017 Nagoya, RoboCupAsia-Pacific2017
足回り
MAXON DCX16 x 4
自作モータードライバ
自作オムニホイール x 4
センサー
自作ラインセンサ(NJL7302L) x 4
JY901 x1
HC-SR04 x 4
CUMcam5(Pixy) x1
バッテリー
HYPERION 2200[mAh] 3cells x 1
マイコン
Arduino DUE x 1
STM32 x 4
キッカー
ソレノイド CA1029 x1
XL6009 + G6A-274P x1
その他
ブラシレスモーター(ドリブラー) : HK-2206-5300kv x1
ダクテッドファン x1
ブラシレスESC : Mamba Max Pro x1
FW Robot

RoboCupJunior2017 Nagoyaのときは棒状,RoboCupAsia-Pacific2017はホイール型のドリブラーを使用していました。





追記(2018/03/03)
ラインセンサは十字に配置しています。ラインセンサ素子の感覚は20[mm]以内となっていて、機体がライン上にいると必ずどこかのラインセンサが反応するようになっています。
GK Robot






コメント一覧
コメント一覧 (11)
RoboCupAsia-Pacific2017優勝おめでとうございます。
質問があるのですが、
ラインセンサをそのような配置にしたのはなぜですか?
また、どのようにセンサを読んでいますか?教えてください。
よろしくお願いします。
ラインセンサが反応した後の動作の方向はどのように決めていますか?
一つ質問なのですが、ラインセンサーを隠す際、なんの素材を使用していますか。
回答していただけると幸いです。
よろしくおねがいします。